
Novel Vision-based Algorithm to Track Pose of Spacecraft in Real Time
Date:18-06-2020 | 【Print】 【close】
Guidance, navigation and control technologies of spacecraft require accurate tracking of the relative 6-degree-of-freedom (DOF) pose of the spacecraft in close range during space mission, such as debris removal, landing, rendezvous and docking.
With the boom in computer science, computer vision techniques have recently become increasingly crucial in 6-DOF pose tracking, due to its low energy consumption, rapidness, long work range, and cheapness.
However, traditional vision-based pose tracking methods suffer from relatively low accuracy, long runtime and is incapable of determining the pose of spacecraft with multi-rigid-body structure.
Researchers from the Shenzhen Institutes of Advanced Technology (SIAT) of the Chinese Academy of Sciences in collaboration with Beihang University developed a novel vision-based algorithm to track the 6-DOF pose of a multi-rigid-body spacecraft in real time. The study was published in IEEE Transactions on Aerospace and Electronic Systems.
On a general spacecraft, there exists plenty of geometric primitives (GPs), such as line segments, circles, spheres, cones, cylinders, developable surfaces, etc. The proposed algorithm tracks the 6-DOF pose of spacecraft via geometrically fitting the GPs on the spacecraft with Generalized Expectation-Maximization, M-estimation and Extended Kalman Filter.
Eventually, this algorithm could provide the maximum likelihood estimation (MLE) for spacecraft pose and outperforms other up-to-date pose tracking methods in terms of accuracy and rapidness.
Extensive synthetic and real experiments verified that the proposed algorithm could fulfil the pose tracking of spacecraft with about 33.33Hz, and have satisfactory robustness to random noise, background clutter, and dramatic illumination changes in space environment.
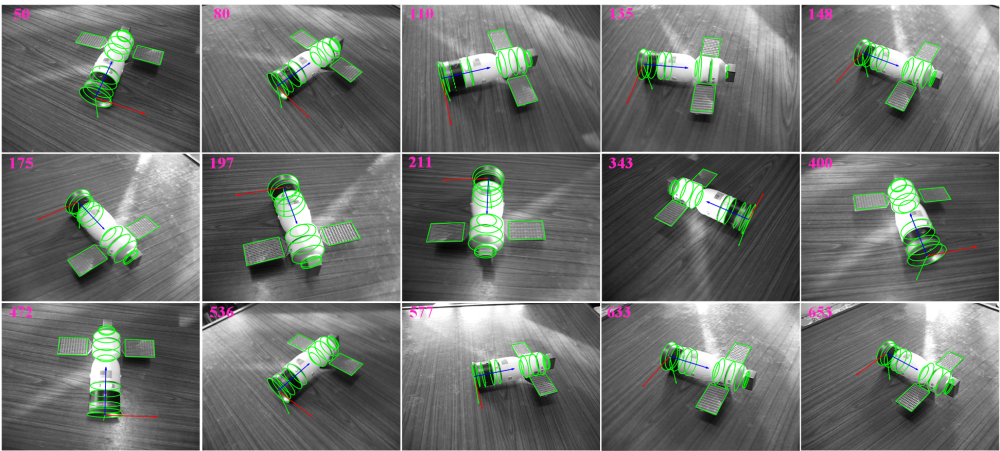
Examples of the tracking for the manned spacecraft model. (Image by LIU Chang)
Media Contact:
ZHANG Xiaomin
Email: xm.zhang@siat.ac.cn

