
New Gait Planning Method Makes Exoskeleton Robot Easy to Control
Date:31-03-2020 | 【Print】 【close】
Paraplegia is an impairment in motor or sensory function of the lower extremities, results from disease or injury of the spinal cord that causes interference with nerve paths connecting the brain and the muscles.
To address these impairments, wearable “exoskeleton robots" is quickly emerging as a method that helps improve this rehab process.
Researchers from the Shenzhen Institutes of Advanced Technology (SIAT) of the Chinese Academy of Sciences proposed a new automated intelligent gait planning method that integrated a finite-state machine (FSM) model as an underlying foundation, the experiments has carried out on a exoskeleton robot with four active actuated joints, which was independently developed by this team.
The weight of the exoskeleton robots is crucially important for the paraplegic patients to control, when coordinates with paraplegia patients, the exoskeleton robot lacks of the center of gravity (COG) transfer process, this coordination training process roughly needs several months for the patients to learn.
Researchers calculated the condition of COG transfer and carried out this method planning gait online. The proposed method was based on the inverted pendulum model and simplified to several parameters.
After the offline simulation test and online paraplegic patients walking assistance, the results showed this method has significantly reduced the arm muscle output of the exoskeleton robots, which means it can help the patients to walk without the ability to control the COG transfer.
In the future, the team intends to adjust the gait by estimating the velocity of center of mass (COM), extends to the stairs and slopes of the gait, makes the exoskeleton robots can be used in multiple terrain easily.
This study has been published in IEEE Transactions on Automation Science and Engineering.
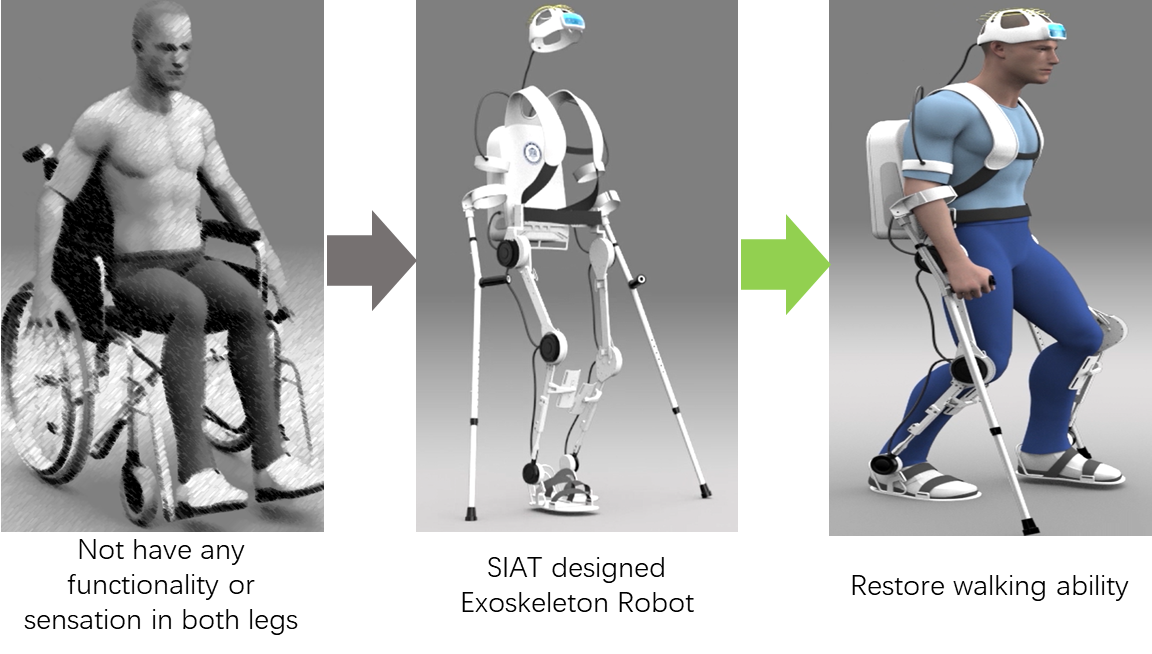
The concept of aiding paraplegic to walk. (Image by MA Yue)

Media Contact:
ZHANG Xiaomin
Email: xm.zhang@siat.ac.cn

